|
|
|
Kategorie
|
|
Informacje
|
|
Polecamy
|
|
|
 |
|
|
Dla tego produktu nie napisano jeszcze recenzji!
 ;
Wszystko w porządku.
Instrukcja czytelna i kompletna.
Dziękuję.
all right!
thank you.
;
Bardzo dobra instrukcja. Zawiera wszystko co potrzeba, polecam!
 ;
Instrukcja jest OK. Schematy czytelne, opisane niektóre procedury.
;
Instrukcja bardzo czytelna. zawiera co potrzeba. Polecam
;
...instrukcja serwisowa w pełni czytelna i kompletna. Dziękuję!
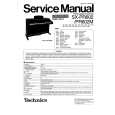
� IPM drive circuit The inverter driving device (IGBT) and the drive circuit are built in the IPM. The IPM receives the signal from the microcomputer and convert it to 0 � 15 V signal to drive the IGBT. When the unit operates at low speed, a chopper signal is emitted from the micro computer as shown in Fig. 4-6. (0 to 5 V) The signal is converted to 0 � 15 V at inside the IPM and transmitted to the gate of the transistor (IGBT) in each phase to drive the IGBT. When abnormal peak current was detected while the inverter is driving, the IPM outputs the Fail signal immediately from the pin (29) and forces the lower arm transistor to shut off at the same time. In this step, the Q501 is turned on and the input signal of the upper arm is also shut off through the D501 and D502, so that all signals to the IGBT are shut off. This signal is also distributed to microcomputer (17 pin) as a Lo signal to stop the drive signal and blink the self diagnosis lamp as two time. When the peak current is detected, the IPM keeps the lower arm off for about 4mS and the drive signal into stand-by state. 3 minutes after this state, the micro computer outputs the drive signal and restarts the operation.
(D) Drive signal at point (C)
Fig. 4-6
� 72 �
|
|
|
> |
|